What?
Implement an automatic solution involving a collaborative robot (aka “cobot”) to load/unload sheet metal at the drain pan brake press in DCX for the purpose of freeing up manpower while providing increased volume throughput, along with consistent First Co quality.
How?
Mechanical Design:
Designed sensor fixtures using SolidWorks and Fusion 360, while keeping control of DFM and DFA principles.
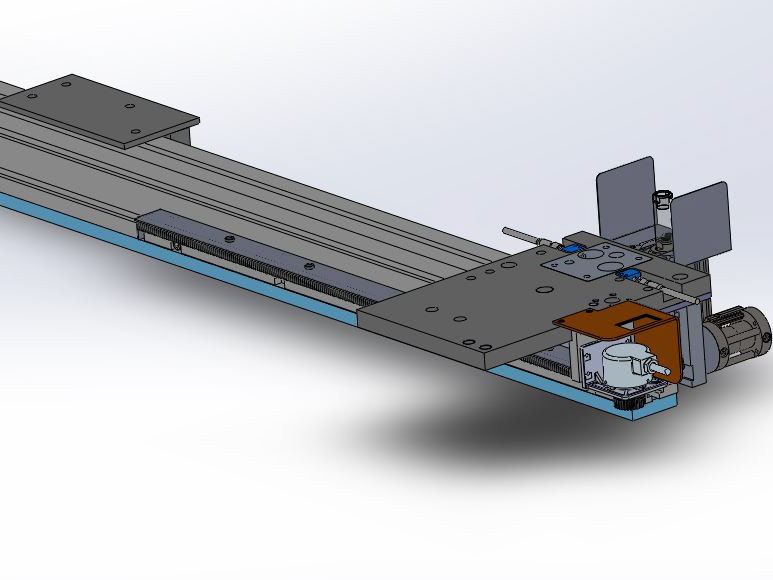
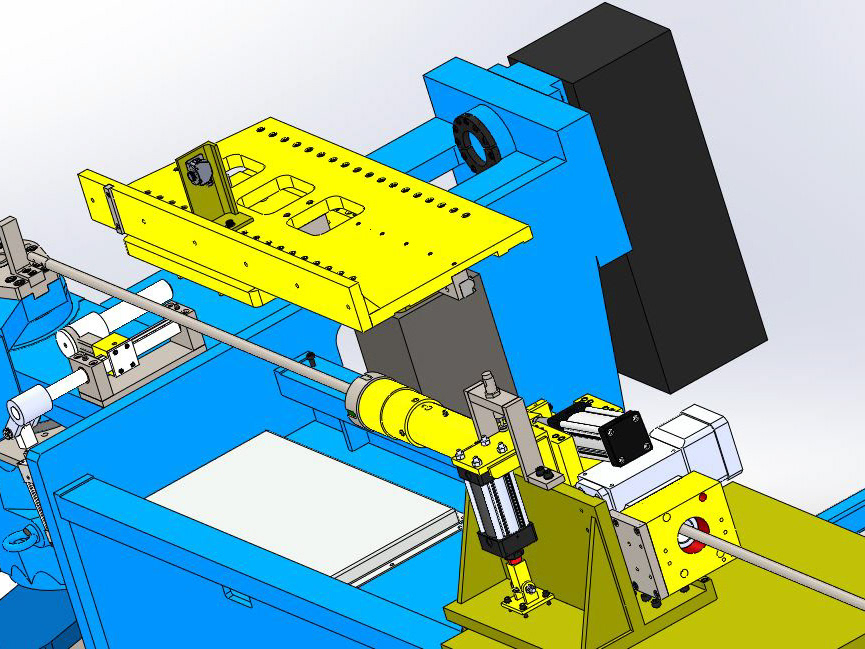
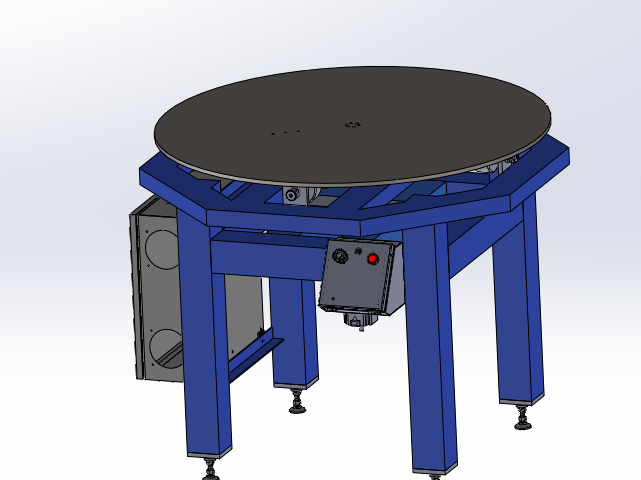
Designed a pneumatic-actuated ramp system using SolidWorks, Fusion 360, and moment principles from statics class to increase cycle time and consistency when integrating the Omron TM14 cobot into the automated system. Ensured to use of DFA principles and maintainability in the case of a replacement needed within the system.
Electrical Design:
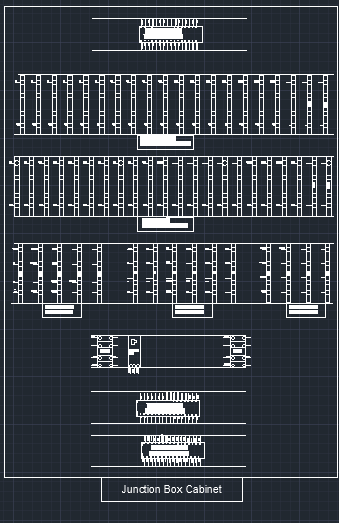
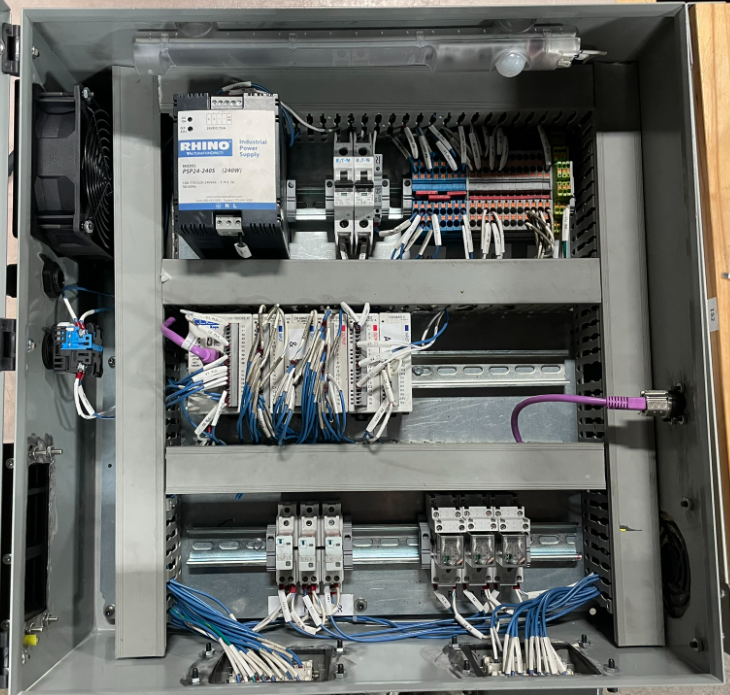
Developed and assembled an electrical diagram using AutoCAD and DraftSight that would enable the PLC and the cobot to communicate and power the system as a whole.
Programming:
Programmed HMI using the C-more software, programmed PLC using the CLICK PLC software, and programmed the Omron TM 14 cobot using the TMFLow software to automate the production line of First Co.'s drain pan production line.
Team Lead:
Led a group of two interns and one engineer by collaborating with them and ensuring that they were involved in the parts of the project that interest them the most. Gave a four-blocker by-weekly project update to upper management and presented the team's progress to the senior manufacturing engineer weekly.
Electrical Diagram Electrical Diagram Implementation

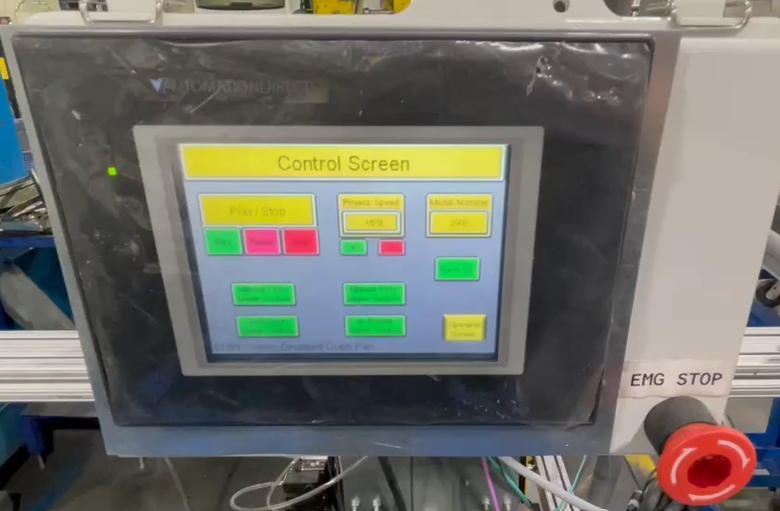
HMI's Display Functions:
Display PLC's I/O, display the Omron TM 14 I/O, display the cycle status, and display the total number of cycles performed by the cobot, display alarms (e.g., pressure sensor, proximity sensors)
HMI's Control Functions:
Play/Pause/Stop the project, increase/decrease project speed, actuate upper and lower vacuum cups, set the robot to manual or auto mode, and implement a recipe depending on the size of the sheet metal.
HMI
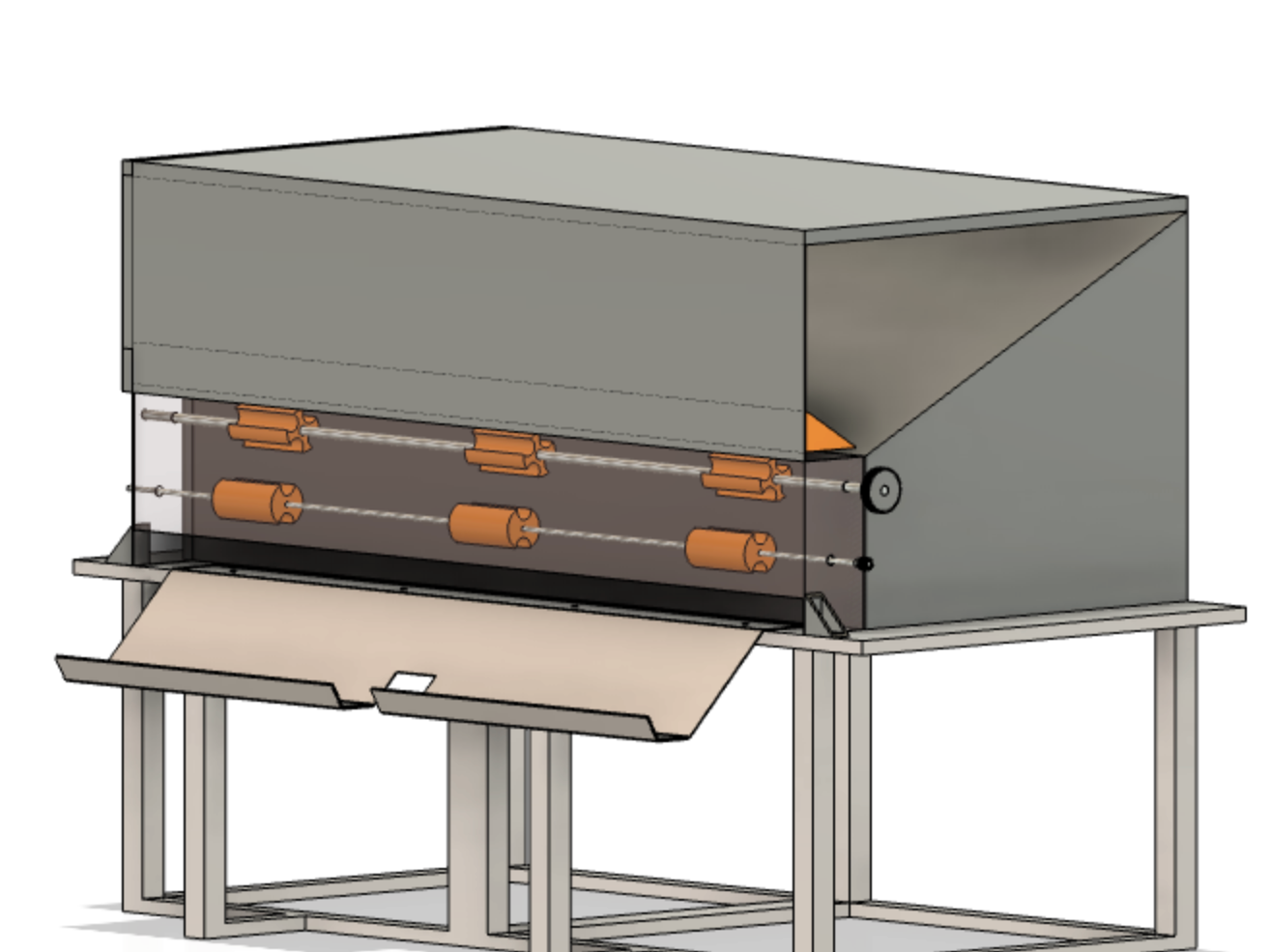
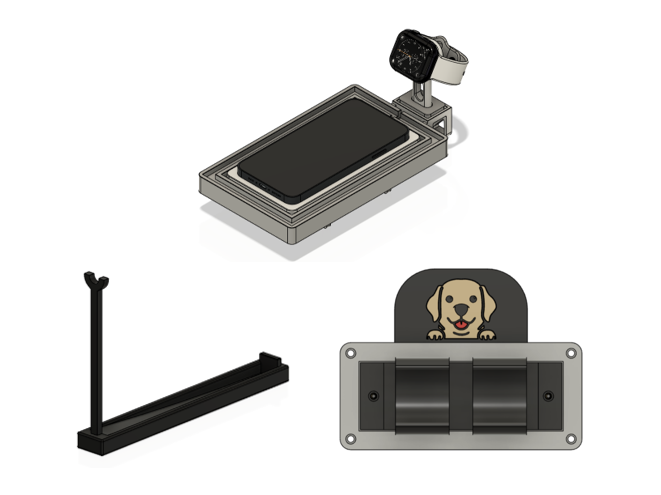
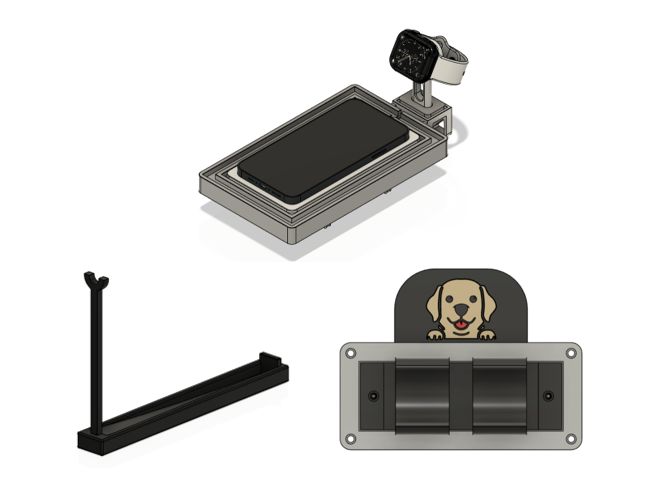
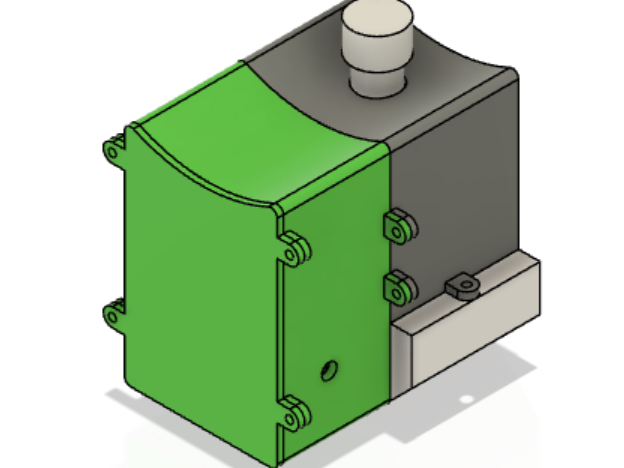
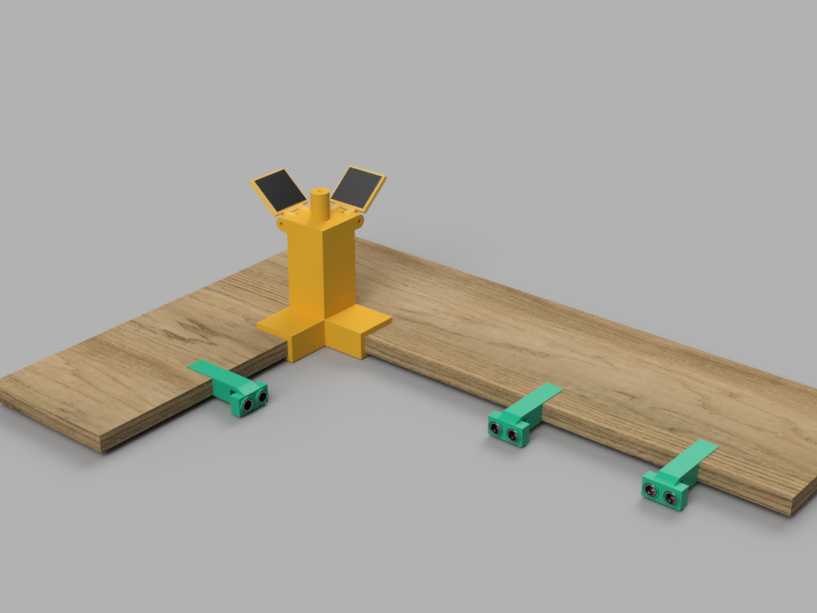
Some Mechanical Designs:
Safety Gate

Proximity Sensor Fixture

Proximity Sensor Fixture

PLC Code (missing images):
Used the CLICK PLC software to enable interactions between the HMI, brake press, and cobot. Used Modbus TCP and I/O communication to carry out this project.
Results?